




Such a design could easily also incorporate laptops in our stack to make it more mobile. We can easily enough add a master battery and inverter, though no stand-alone inverter is needed if you tap 48v into 12v circuits, or simply utilize a 12v battery, for example. Efficiency gains are realized by removing the inverter from the mobile equation, where a traditional server PSU becomes a battery charger and the net system serves as perhaps also ballast in place of serving only as our inverter.
Our robot plugs in when not on the road, any case, whereby in plugging in the batteries are charged but provide also cleaner power to the stack.
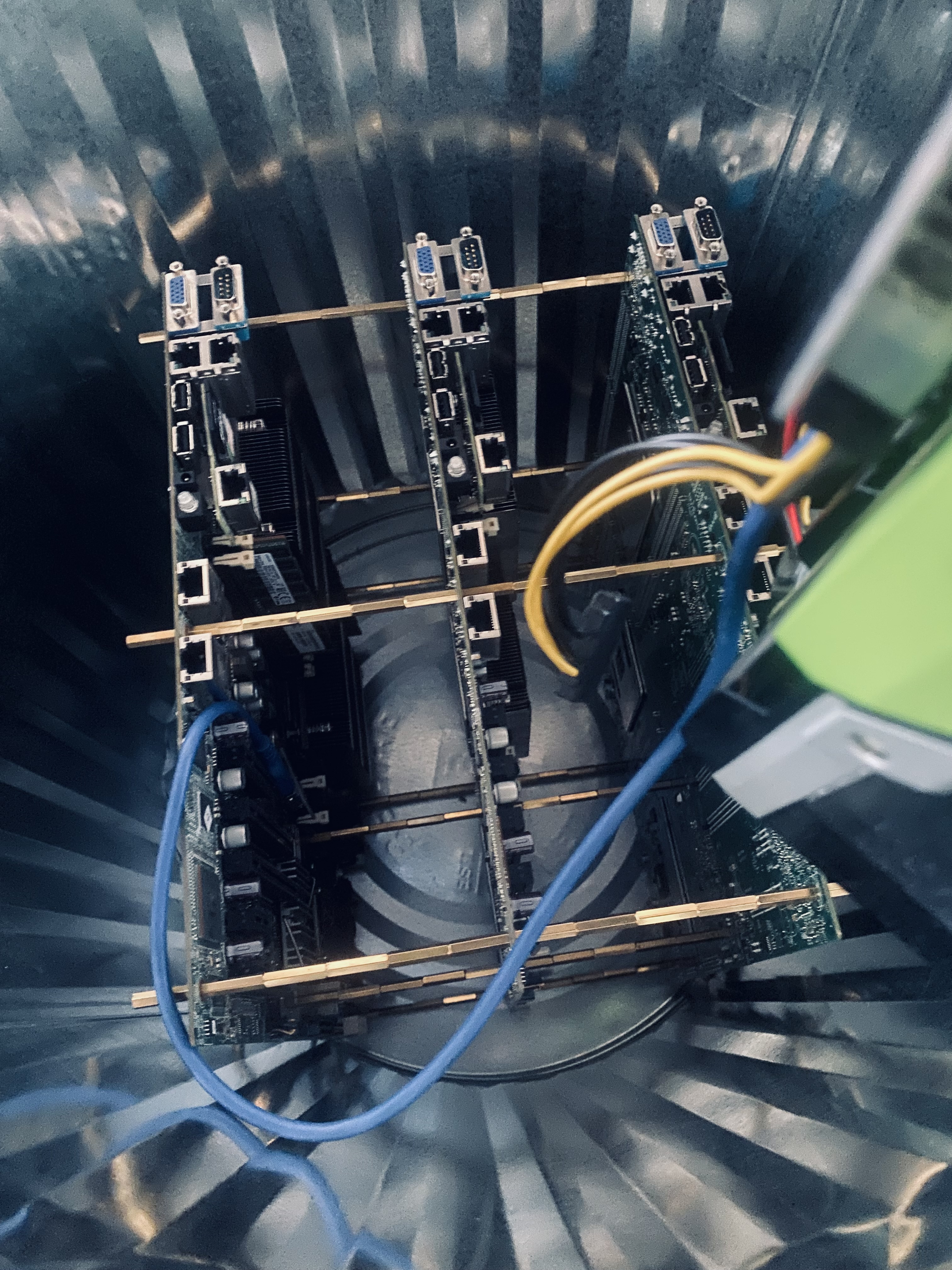
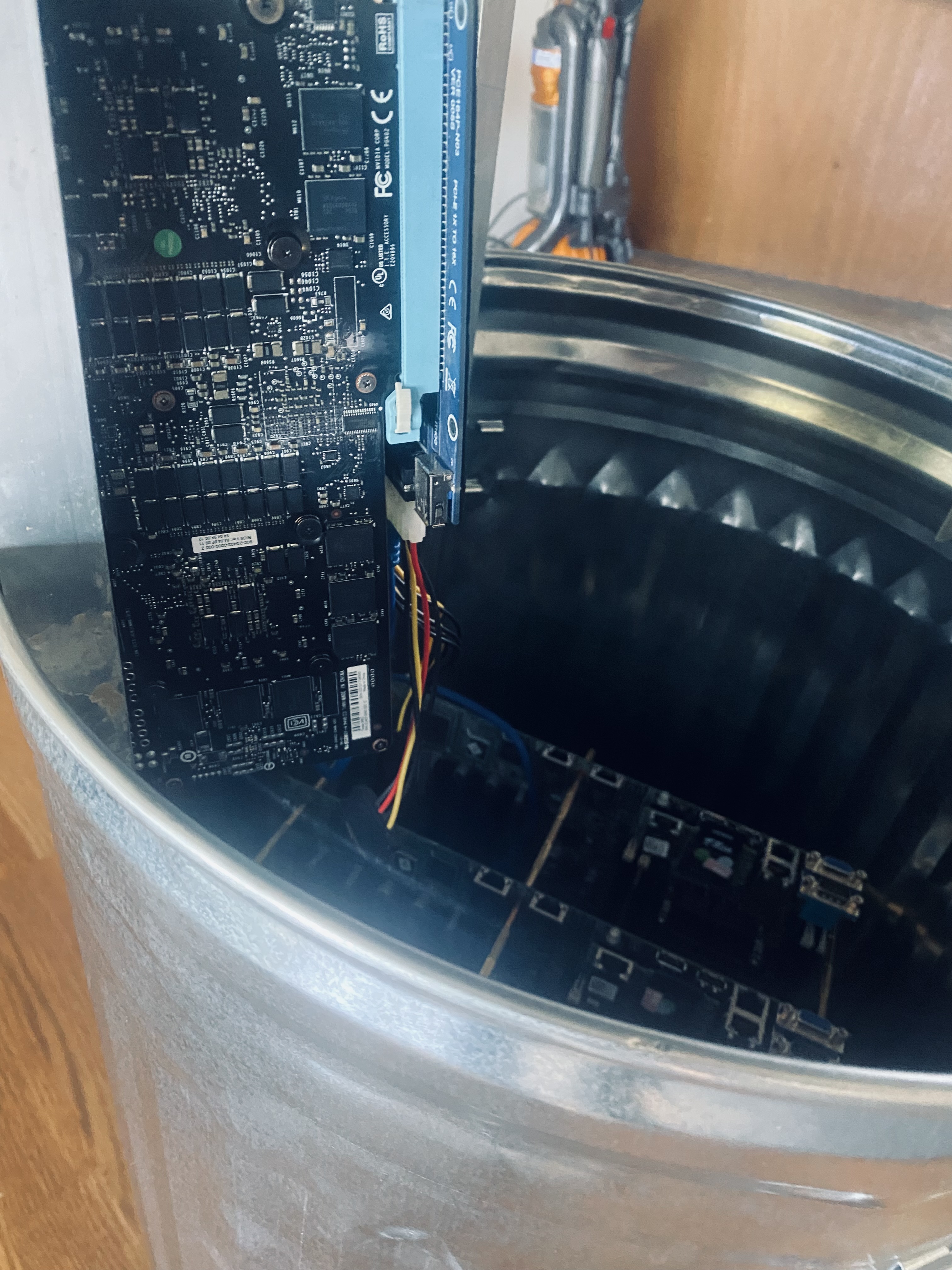
This design here is intended for relative non-mobility, but we make it obvious that we can become mobile by adding those laptop stacks with discrete graphics in place of motherboards. Our trashcan is small but a larger trashcan can (ha!) be used as is currently in development in parallel.
It’s even possible to containerize an array of old cell phones. Our chosen hardware depends upon the application.
Long term the design calls for the usage of our trashcan as both a capacitor and antennae in place of the usage of only a battery. More on this later on.
Stay tuned. God bless.